
Longer-range Bottom Tracking for Submerged Vehicles
Across their wide-ranging activities, submerged vehicles need reliable navigation. It underpins optimized operations, expanded capabilities, and greater cost-effectiveness. With flourishing use of DVL-based navigation on submerged vehicles, there is a push to operate at greater ranges from the seabed.
XRT Technology
XRT technology adds 60% more bottom-tracking range for Doppler Velocity Logs (DVL). And it still provides reliable, low-noise velocity measurements at high update rates. Moreover, XRT operates at the same frequency and power consumption. This impressive gain stems from new signal processing to boost the signal-to-noise ratio (SNR) seen by the DVL.
Developed by Teledyne RDI, XRT is a hybrid technology that merges new ideas in both transmit and receive stages of the DVL. The DVL transmits a new style of coded signal. This method continues a Teledyne RDI tradition, first patented almost three decades ago.
Every system has a SNR threshold that sets the bottom-tracking range of the DVL. The noise can have a couple of flavors—environmental and electronics. Here we address the latter.

Teledyne RDI Pioneer 600 kHz DVL fitted with iXblue PHINS 6000 inertial navigation system
Boosting SNR
For setting the SNR level, the signal power is prescribed by the strength of the returning signals. Sending louder signals has limited advantage for increasing range. Much of the extra energy is lost to acoustic shock waves.
In contrast, the noise power is set by the bandwidth over which the received signals are processed. Filtering across narrower bandwidths allows the cutoff for processing to be pushed to weaker signals. Smarter processing allows the DVL to take advantage of seabed echoes from farther ranges.
Of course, there is no free lunch: using narrowband filters requires careful implementation. More complex, adaptive algorithms are needed to avoid any bias in the processed output.
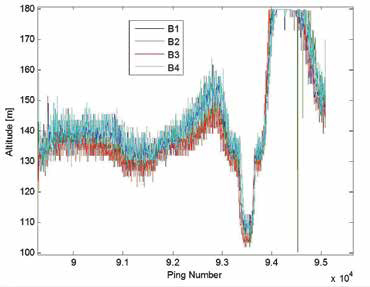 Ranges for four beams of Pioneer DVL using XRT. Results are for 600 kHz operation on a deep and steep seabed. Rolling motion of boat contributes much of the 3-m r.m.s. spread.
Ranges for four beams of Pioneer DVL using XRT. Results are for 600 kHz operation on a deep and steep seabed. Rolling motion of boat contributes much of the 3-m r.m.s. spread.
Field Testing
XRT performance was validated in trials at two sites: Mediterranean Sea (Med) off La Ciotat, France and Southern California Bight off San Diego. We focus here on the European trials in June 2018 where testing was conducted in varying water depths that increased beyond 180 m.
Testing in the Med was performed with iXblue, who integrated Teledyne RDI’s Pioneer 600 kHz DVL with an iXblue PHINS 6000 system. The Pioneer is a compact phased array design with specified bottom-tracking range of 100 m.
XRT Altitude Results
Comparing new results calls for a baseline. Teledyne RDI’s standard bottom-tracking mode was operated in shallower depths. The data dropout rate was 2 per 1000 pings.
XRT testing targeted deeper water. In fact, XRT was tracking reliably in 180 m depths, which was deeper than previous testing. In the deeper water, XRT’s data dropout rate was 1 per 1000 pings—even over steep terrain. This rate beat the baseline threshold set in shallower depths.
Several factors contributed to XRT’s 15% farther reach in the Med than off San Diego, especially bottom type. Coarse sand off La Ciotat has a higher scattering strength than the muddy bottom off San Diego.
Phased array technology allows submerged vehicles to carry compact, low-frequency DVLs to reach longer ranges. Teledyne RDI’s new XRT multiplies this advantage by extending the DVL’s operating range an additional 60%. Meanwhile, the DVL still provides reliable, low-noise velocity measurements at high update rates.

