Underwater survey work is frequently carried out using
autonomous underwater vehicles (AUVs). The benefits of using AUVs are that they are programmed to carry out missions without intervention, can fly at consistent low altitudes to achieve high resolution measurements, and are not as sensitive to surface conditions as a tethered system.
AUVs can be equipped with a wide range of sensors, including side-scan sonar, multi-beam echo sounders, sub-bottom profilers and cameras. Magnetometer surveys are conducted routinely in mining and petroleum resource exploration, archaeological surveys, and for detecting and locating pipelines and other seabed or buried ferrometallic objects.
Magnetometers have always been a particular challenge to mount on AUVs, because of their strong magnetic signatures and strict power budgets, until now. Towing the Explorer AUV Magnetometer behind the AUV solves this challenge due it its small size, low drag and 2 watt power requirement.
During the week of February 11th to February 17th, 2018,
Teledyne Gavia and Marine Magnetics carried out a trial with the
Gavia AUV towing the Explorer AUV Mag. This trial showed that the magnetometer can detect targets weighing as little as 1kg.
 Explorer in the water ready for the start of the mission.
Explorer in the water ready for the start of the mission.
System Setup
Magnetometer
The magnetometer used for this trial, was the Explorer AUV Mag. It’s small, neutrally buoyant design, and low 2W power consumption limits drag and drain on the battery, enabling the AUV to run longer missions.
The mag’s Overhauser sensor technology has an absolute accuracy of 0.1 nT. This enables the Explorer AUV mag to operate in any direction, at any depth, any-where in the world, while providing high resolution data free from dead zones, heading error, time and temperature drift.
The absence of these errors in the mag AUV data, is particularly significant, as an analytic signal map can be generated from a single sensor, to locate small targets.
Absolute Accuracy
| 0.1 nT
|
Sensor Sensitivity
| 0.02 nT
|
Counter Sensitivity
| 0.001 nT
|
Resolution
| 0.001 nT
|
Dead Zone
| NONE
|
Temperature Drift
| NONE
|
Power Consumption
| 2 W
|
Range
| 18,000 nT to 120,000 nT
|
Gradient Tolerance
| Over 10,000 nT/m
|
Sampling Range
| 4Hz - 0.1Hz
|
Autonomous Underwater Vehicle
 The vehicle used was a standard
Gavia AUV, which is a modular underwater vehicle with 1000m depth rating. It was equipped with a single battery, a Kearfott T-24 INS system, and a
Science Bay module (see Figure 3). The navigation accuracy of the INS system used is 0.1% of distance travelled (CEP50). Using the overlap of the side-scan sonar imagery it was possible to determine that the navigation drift was below 4m over the 10km mission or 0.04% error of distance travelled. The Science Bay module was used to connect the magnetometer to the vehicle. It provided power and a RS-232 connection. The data recorded during the mission was stored on the vehicle main mission computer.
The vehicle used was a standard
Gavia AUV, which is a modular underwater vehicle with 1000m depth rating. It was equipped with a single battery, a Kearfott T-24 INS system, and a
Science Bay module (see Figure 3). The navigation accuracy of the INS system used is 0.1% of distance travelled (CEP50). Using the overlap of the side-scan sonar imagery it was possible to determine that the navigation drift was below 4m over the 10km mission or 0.04% error of distance travelled. The Science Bay module was used to connect the magnetometer to the vehicle. It provided power and a RS-232 connection. The data recorded during the mission was stored on the vehicle main mission computer.
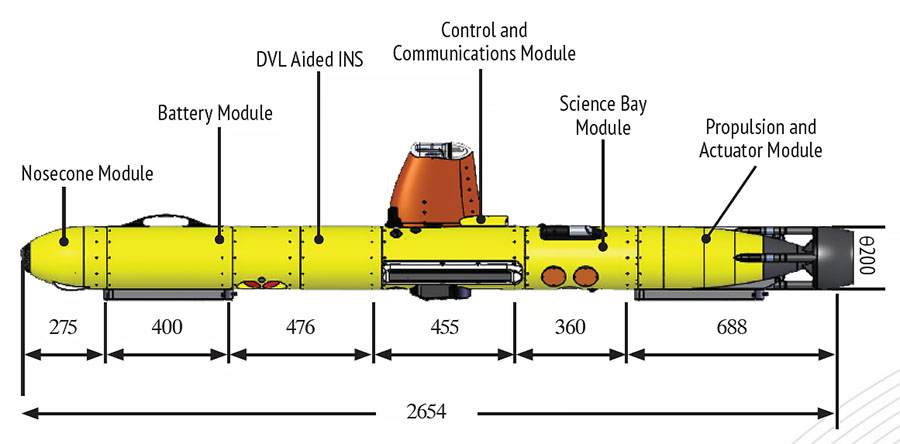 The Gavia AUV configuration used for these trials.
The Gavia AUV configuration used for these trials.
Surface Vessel

The surface vessel used for the trials was the Gavia workboat LÓMUR. It is especially equipped for supporting Gavia operations, including a modem moon pool, cradle for the Gavia, and all standard safety equipment like a life-boat, AIS, and GPS. The Gavia was brought to the operation area aboard LÓMUR and deployed by lifting it overboard. During the survey the LÓMUR left the survey area to ensure it would not affect the survey.
Operation
Survey Area
The survey area was fairly flat, ranging from 10-13m in depth. The seafloor was primarily muddy, with small rocks spread over the area. The underlying Icelandic geology is volcanic and therefore strongly magnetic, ranging from 51400 nT to 51900 nT, resulting in background variations of at least two orders of magnitude stronger than the signals expected from the targets.
Survey Parameters
 Two 80m x 200m survey missions were conducted over the same area. One before seeding, and the second post-seeding on the following day. The vehicle maintained an altitude of 2.5m above the seafloor, while operating at a speed of 3kts.
Two 80m x 200m survey missions were conducted over the same area. One before seeding, and the second post-seeding on the following day. The vehicle maintained an altitude of 2.5m above the seafloor, while operating at a speed of 3kts.
The line spacing was 2m, providing an extremely high resolution map of the survey area, unachievable by conventional means. The targets were comprised of two sets of iron pipes weighing 1kg, 3kg, 10kg and 20kgs.
High frequency side-scan sonar data was collected using an EdgeTech 2205 600/1600 dual frequency side-scan sonar set to 10m range. The overlap in side-scan data allowed for very fine post-survey position corrections, useful for such high density coverage.
Results
Magnetic maps were created from the data collected during the surveys of the un-seeded and seeded areas. The magnetic field varied significantly over the survey area, ranging from 51400 nT to 51900 nT, a span of 500 nT. In comparison, the smallest seeded targets produced signals of 1- 5 nT.
In order to detect such small signals, especially amidst the coarse geological variation, the standard practice is to produce an analytic signal map, for which normally a gradiometer is required. However, we demonstrate that the same ana-lytic signal map can be produced by a single magnetometer provided that two important conditions are met.
Firstly, the AUV is able to follow tight line spacing at constant altitude to achieve a high resolution survey.
Secondly, the magnetometer has high absolute accuracy and is free of drift and heading error. Both the
Gavia AUV and the Explorer Magnetometer exhibited these characteristics.
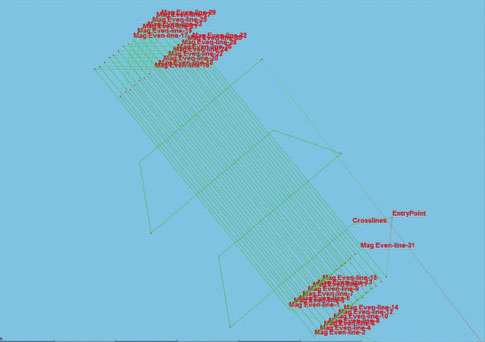
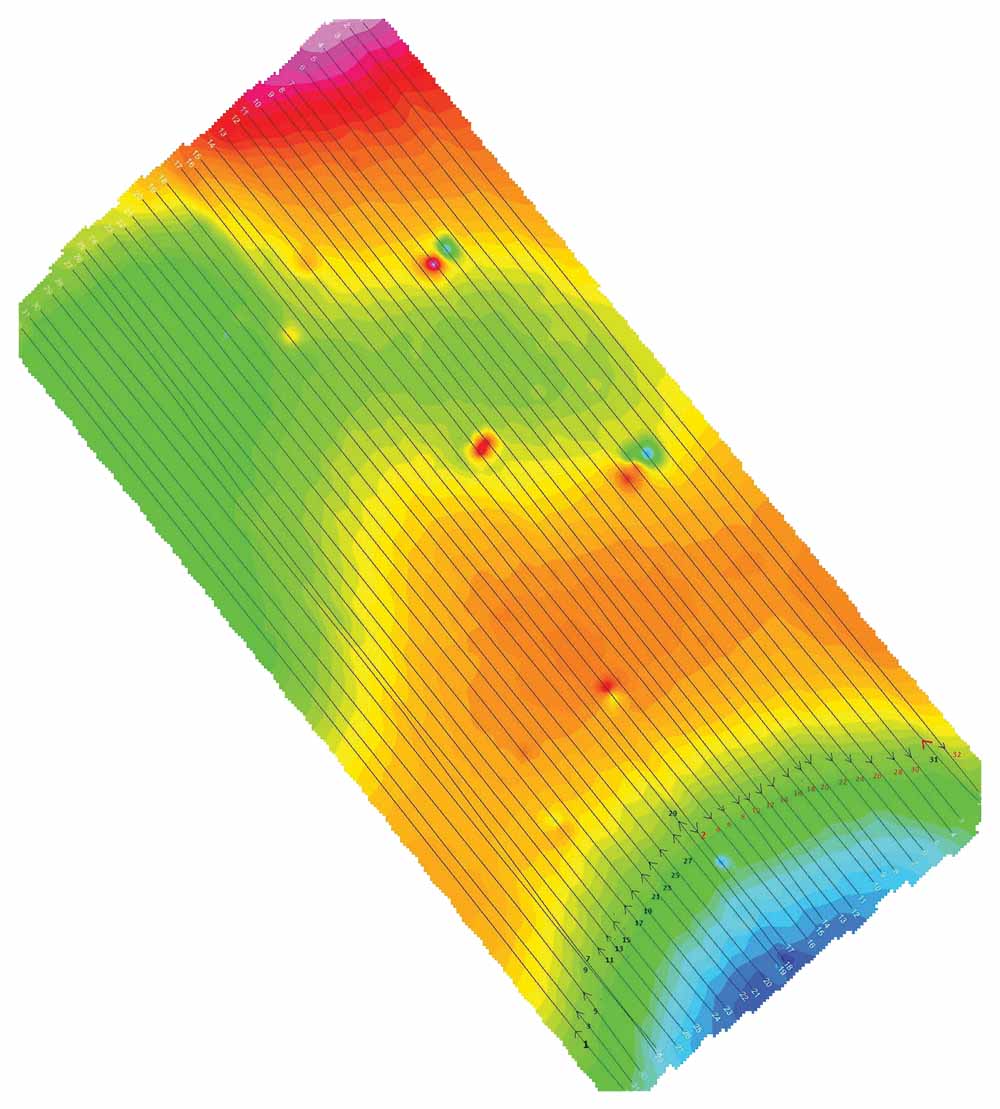
1) Overview of survey area 80m x 200m. 2m line spacing. 2) 20kg target
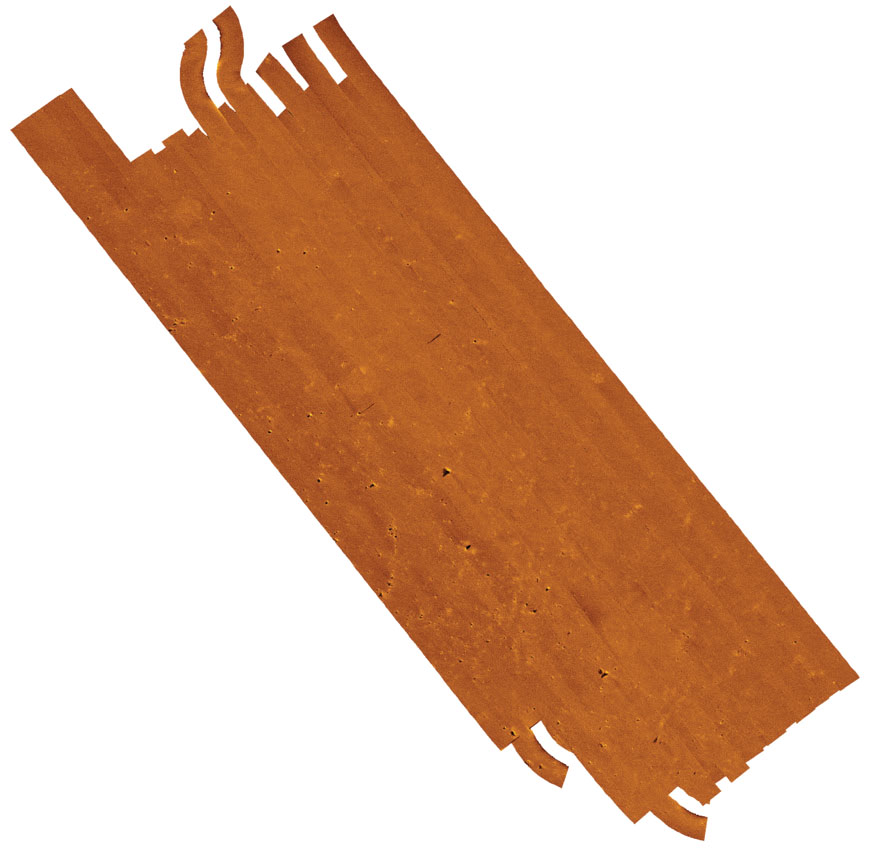
Side-scan sonar mosaic created using SonarWiz 7 from Chesapeake Technology.
Magnetic maps –total field, analytic signal before seeding, and analytic signal after seeding; each “x” indicates target detection.
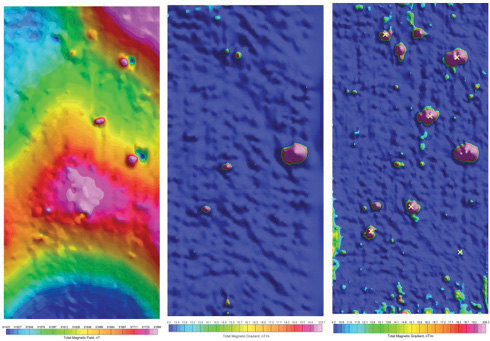
The left most image is the total field, the middle is the computed magnetic gradient (analytic signal) of the unseeded field, and to the right is the analytic signal map of the seeded field.
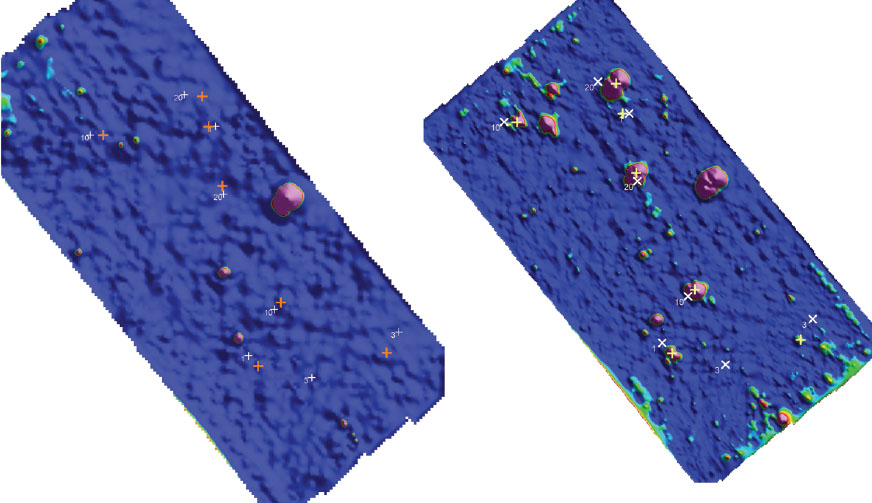
To the left is the magnetic analytic signal map of the unseeded survey area, showing target locations. To the right is the seeded target field. The cross is the drop location and plus is the estimated target location from the magnetic map.
Using the side-scan sonar records, it was possible to generate a high resolution mosaic of the survey area. Fusing the mosaic and magnetic maps together, made it possible to see that many of the targets were not detected by the side-scan sonar. This is likely because of the small size of the deployed targets, and because some of the deployed targets were buried.
As shown in figure 7, the data collected with
the Gavia produced high quality analytic signal maps that effectively eliminated much of the background geological signal while introducing relatively little noise. The high spatial resolution of the survey allowed the precise identification of many local anomalies, including the seeded targets.
Of the eight targets deployed, seven were successfully identified. The lone 1 kg target was likely obscured by the signal of other local anomalies, which could have been produced by rocks, or other man-made debris in the area.
Target Verification
After the magnetometer survey, the area was also surveyed using a digital camera. Using this data, it was possible to confirm several of the target locations (as shown in the figures below) in addition to seeing some of the natural targets already in the area.
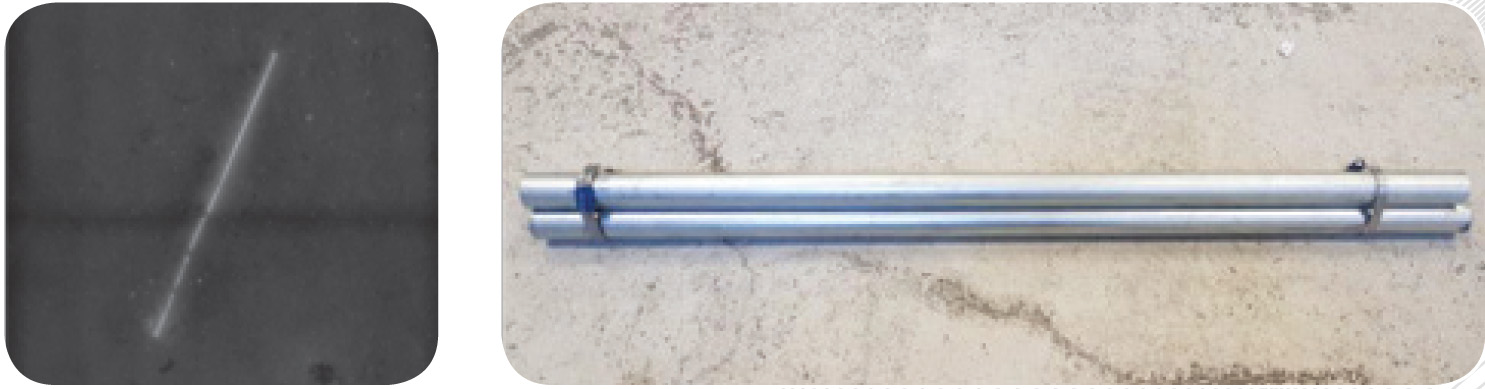
The 10kg South target mostly buried.

The 20kg target to the north.
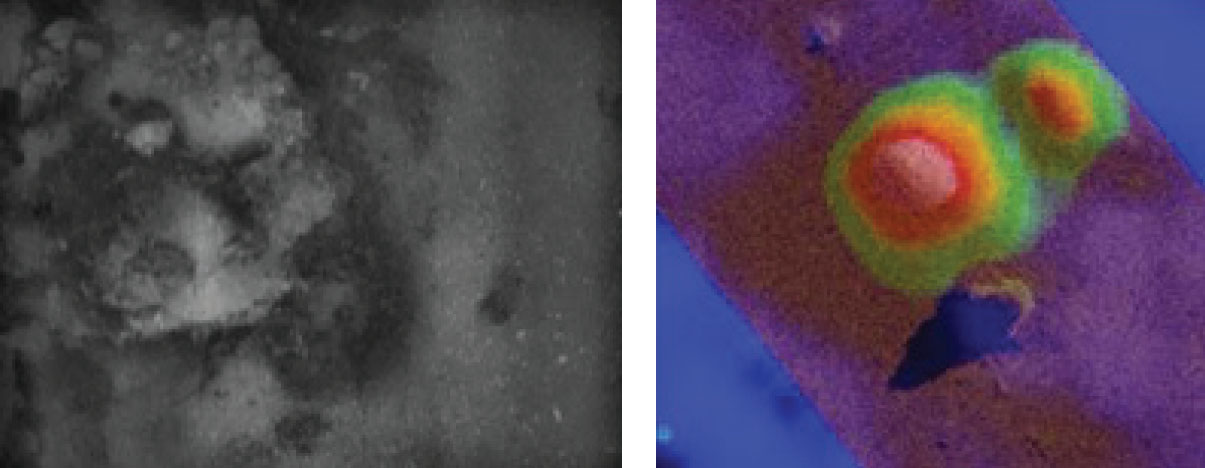
This rock formation correlated with a strong magnetic signature. The photograph is on the left and the combined magnetic analytic signal map and side-scan sonar image is on the right.
Conclusion
This trial shows that the Gavia is able to tow the Explorer and maintain tightly spaced track-lines, allowing for the next generation of accurate and high resolution magnetic maps. Explorer’s high accuracy and sensitivity enabled it to find small targets, undetected by the side scan sonar records. This demonstrates that multi-sensor surveys aid in the characterization of targets, which is of great value when the area contains large amounts of clutter.
The geology in Iceland is strongly volcanic with a shallow basement, and large regional variation at particularly short wavelengths. This makes Iceland potentially one of the most difficult areas in the world to survey for near-surface magnetic targets. The
Gavia AUV’s precise and accurate positioning coupled with the Explorer AUV mag’s high absolute accuracy and sensitivity, allowed for the collection of very high resolution data that would not be possible by other means and resulted in the detection of very small UXO-like targets in extreme conditions.

